| Jesteś w:Uniwersytet Przyrodniczy we Wrocławiu » Instytut Geodezji i Geoinformatyki » Aktualnosci |
Aktualności
Modelowanie zegara odbiornika zwiększa stabilność pozycjonowania PPP GNSS
20-03-2026
Precyzyjne pozycjonowanie punktów (PPP) z wykorzystaniem GNSS w czasie rzeczywistym odgrywa coraz większą rolę w geodezji, monitoringu deformacji oraz w systemach wymagających szybkiego i wiarygodnego wyznaczania pozycji. Jednym z czynników ograniczających stabilność takich rozwiązań pozostaje zegar odbiornika GNSS, który wpływa na jakość estymowanych współrzędnych, szczególnie w przypadku składowej wysokościowej współrzędnych. W opublikowanym artykule przeanalizowano, czy odpowiednie modelowanie zegara odbiornika może poprawić stabilność rozwiązań GPS+Galileo PPP z wykorzystaniem wybranych stacji Międzynarodowej Służby GNSS wyposażonych w ultra-stabilne masery wodorowe. W tym celu wykorzystano produkty referencyjne w czasie rzeczywistym, takie jak HAS, IGS, CNES oraz porównawcze rozwiązanie w trybie przetwarzania końcowego z produktami CODE. Uzyskane wyniki wykazały, że takie podejście redukuje krótkookresowe wahania zarówno dla zegara odbiornika, jak i współrzędnych, zwłaszcza składowej wysokościowej.
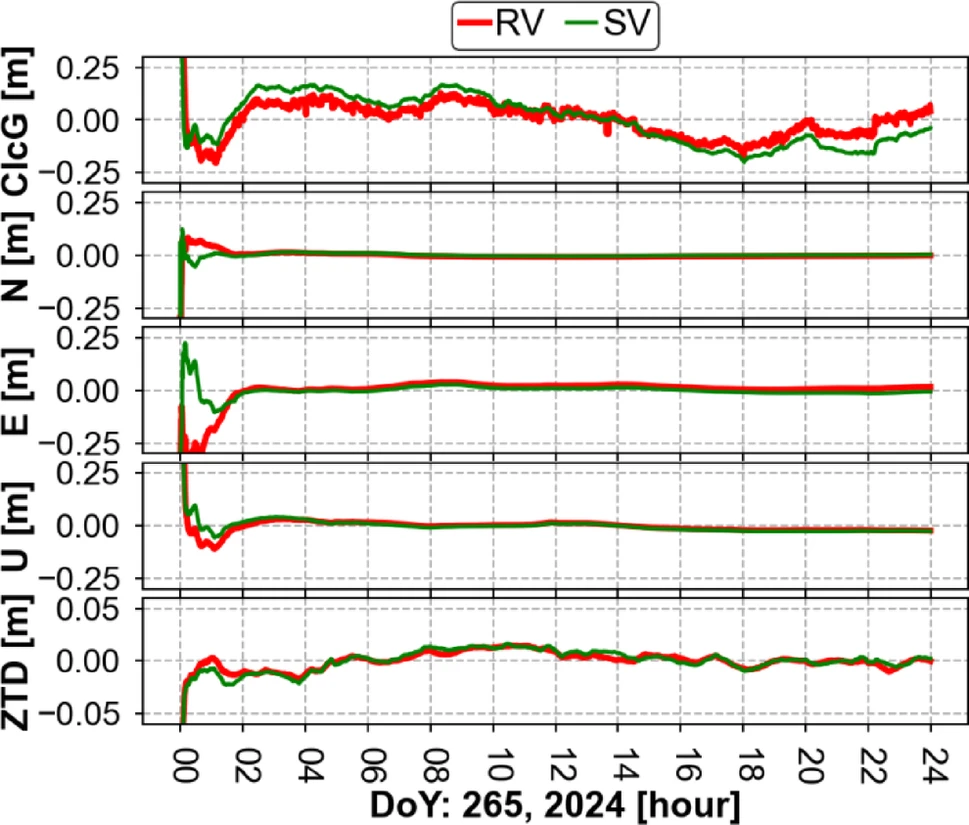
Powyżej przedstawiono statyczne rozwiązanie multi-GNSS PPP na przykładzie stacji NRC1 z wykorzystaniem produktów CNES, w którym porównano dwa podejścia: 1) standardowe (RV) wyznaczanie zegara odbiornika niezależnie w każdej epoce oraz 2) rozwiązanie z dodatkowym modelowaniem (SV) zegara odbiornika. Po zastosowaniu dodatkowego zawarunkowania estymowane wartości stają się wyraźnie bardziej stabilne, a największą poprawę obserwuje się dla zegara odbiornika oraz składowej wysokościowej. Istotne jest również to, że zwiększenie stabilności tych parametrów nie prowadzi do pogorszenia jakości estymacji pozostałych parametrów.
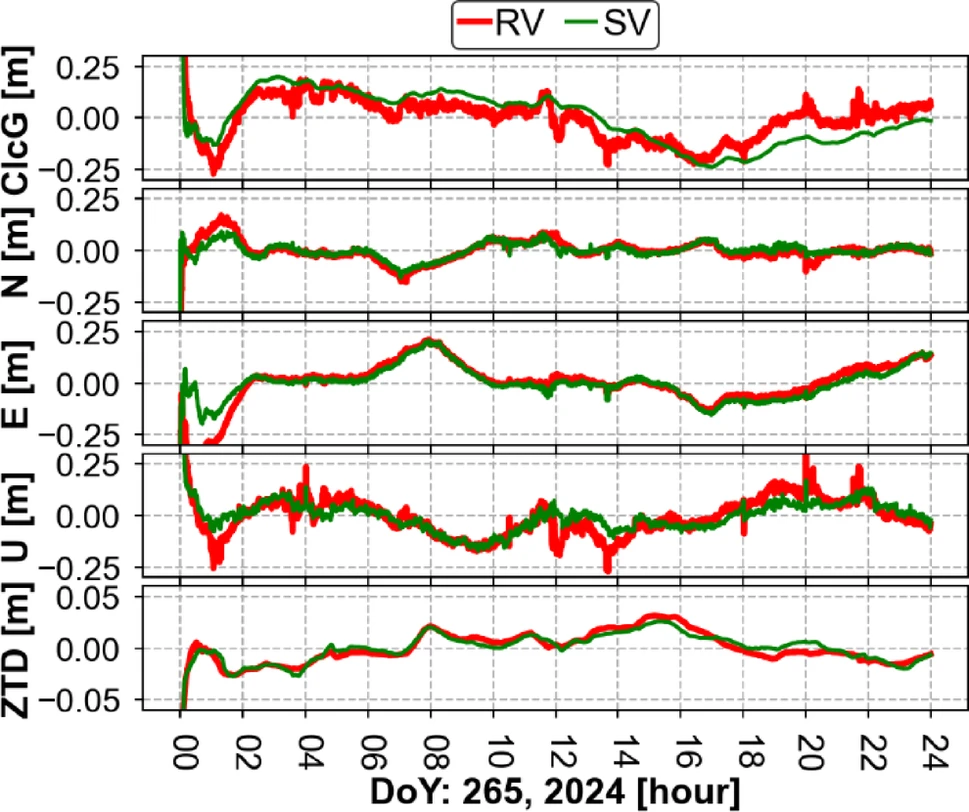
Podobny efekt zaobserwowano również w kinematycznym rozwiązaniu multi-GNSS PPP na przykładzie stacji NRC1 z wykorzystaniem produktów CNES. W tym przypadku wpływ modelowania zegara odbiornika okazuje się jeszcze wyraźniejszy. Zredukowaniu ulegają szybkie wahania zegara odbiornika i składowej wysokościowej, a całe rozwiązanie zachowuje większą stabilność w czasie. Wskazuje to na szczególne znaczenie odpowiedniego modelowania zegara odbiornika w zastosowaniach wymagających wysokiej jakości wyników uzyskiwanych w czasie rzeczywistym.
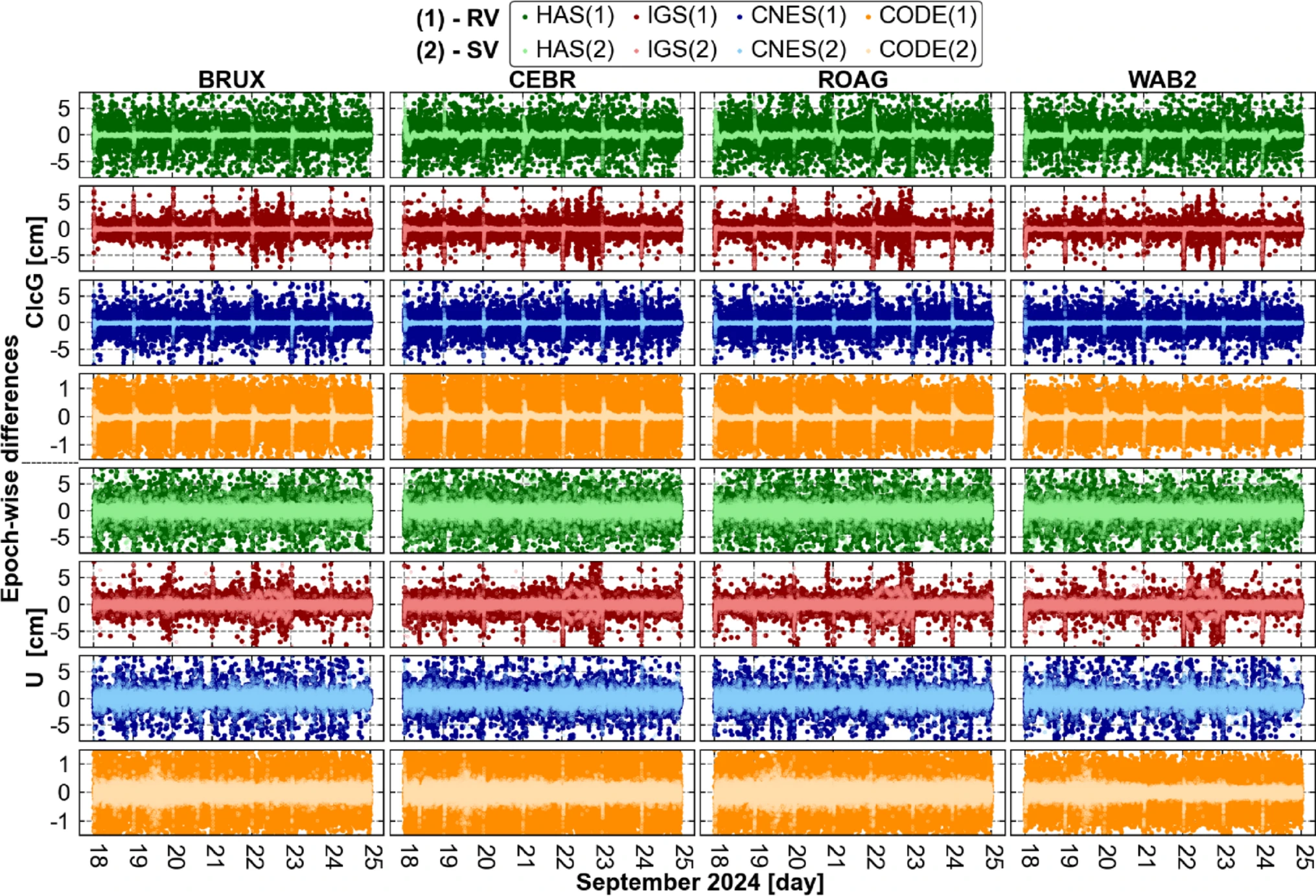
Dodatkowa analiza zmian pomiędzy kolejnymi epokami w kinematycznym rozwiązaniu multi GNSS PPP potwierdziła poprawę krótkookresowej stabilności. Po zastosowaniu modelowania zegara odbiornika wyraźnie zredukowana została zmienność pomiędzy sąsiednimi epokami zarówno dla zegara odbiornika, jak i dla składowej wysokościowej. Korzyści te nie ograniczają się jedynie do początkowej fazy zbieżności, lecz utrzymują się również w dalszej części przetwarzania.
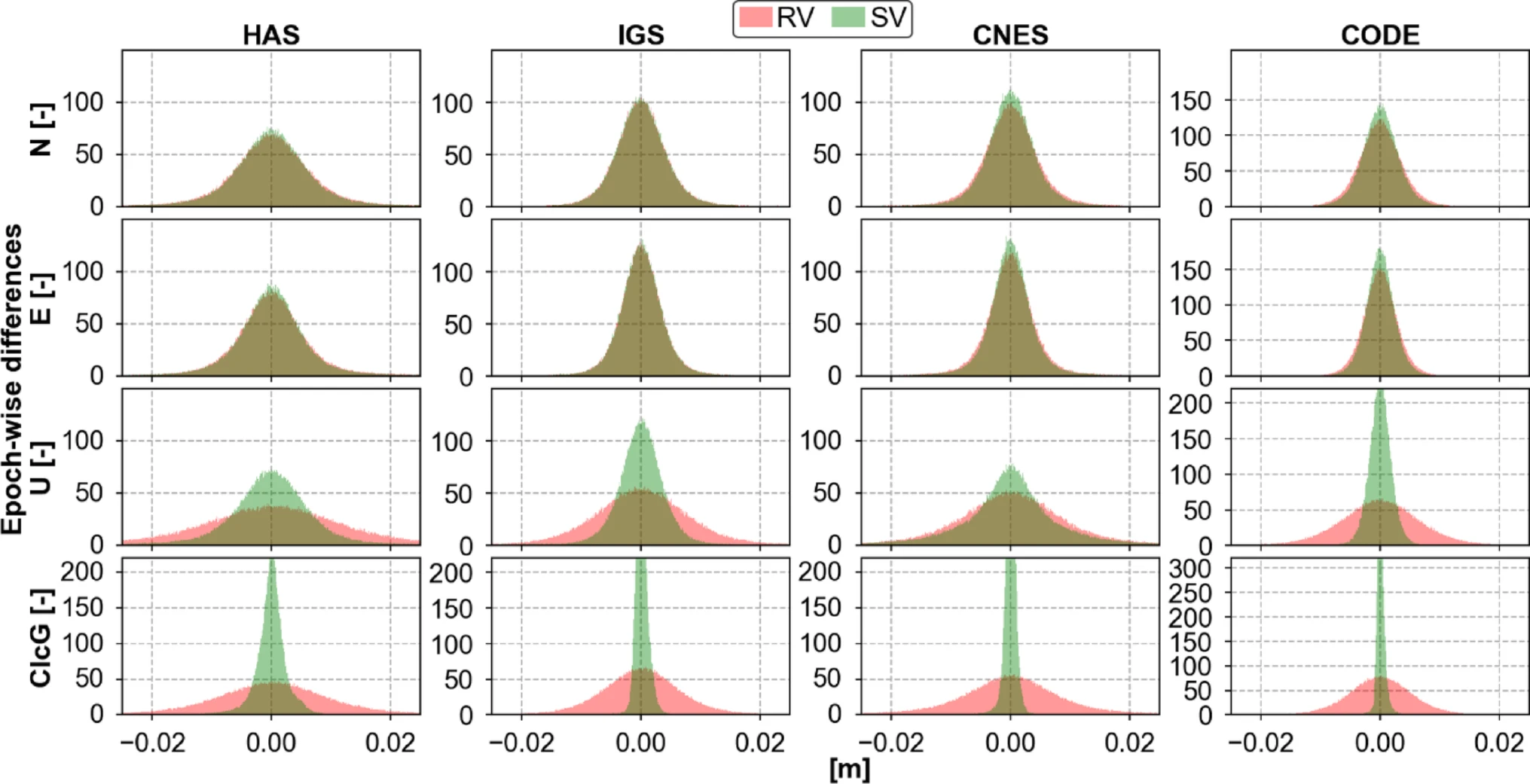
Analiza rozkładów różnic pomiędzy sąsiednimi epokami, przeprowadzona dla wszystkich wyników uzyskanych w kinematycznym rozwiązaniu multi-GNSS PPP wykazała, że po zastosowaniu modelowania zegara odbiornika rozkłady stają się wyraźnie węższe, co świadczy o mniejszym poziomie szumu i większej spójności rozwiązania. Wyniki potwierdzają istotną rolę modelowania zegara odbiornika w poprawie stabilności rozwiązania multi-GNSS PPP.
Najważniejszym wnioskiem badań jest odpowiednie modelowanie zegara odbiornika, co może istotnie poprawić stabilność rozwiązań multi-GNSS PPP. Wyniki wskazują, że odejście od standardowej, niezależnej epokowo estymacji zegara odbiornika na rzecz modelu uwzględniającego jego zmienność w czasie może wyraźnie zwiększyć stabilność rozwiązań multi-GNSS PPP. W analizach statycznych poprawa stabilności składowej wysokościowej w pierwszych godzinach przetwarzania sięgała nawet do 59% rozstępu międzykwartylowego, natomiast w rozwiązaniach kinematycznych dla składowej wysokościowej poprawa wyniosła do 50% odchylenia standardowego. Szczególnie istotne korzyści odnotowano dla składowej wysokościowej, której poprawa stanowi ważny krok w kierunku zwiększenia dokładności i niezawodności rozwiązań PPP.
Więcej informacji w artykule:
Mikoś M., Kazmierski K., Schön S., Sośnica K. (2026). Improving the stability of real-time PPP solutions by receiver clock modeling. GPS Solutions 30, 82
https://doi.org/10.1007/s10291-026-02048-2.
 powrót do poprzedniej strony
powrót do poprzedniej strony |
 |
 |
 |
 |
Nasze konferencje
 ESA 9th International Colloquium on Scientific and Fundamental Aspects of GNSS ESA 9th International Colloquium on Scientific and Fundamental Aspects of GNSSWROCŁAW, 25 - 27 września 2024 |
|
|
|
2th Advanced Training Course On Land Remote Sensing Hydrology and Hazards WROCŁAW, 25 - 29 września 2023 |
|
18th Czech-Polish Workshop - ON RECENT GEODYNAMICS OF THE SUDETY MTS. AND ADJACENT AREAS SZKLARSKA PORĘBA, 26 - 28 października 2017 |
|
XX Ogólnopolskie Sympozjum Fotogrametryczne | Fotogrametria dla geoinformacji Wrocław, 19 - 21 września 2016 |
|
16th Czech-Polish Workshop ON RECENT GEODYNAMICS OF THE SUDETY MTS. AND ADJACENT AREAS Srebrna Góra, 5 - 7 listopada 2015 |
|
COST "GNSS4SWEC - Advanced Global Navigation Satellite Systems tropospheric products for monitoring severe weather events and climate monitoring". Wrocław, 29 września - 1 października 2015 |
|
Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław, 02-04 czerwca 2011 |
Kartka z kalendarza
|

Kontakt
|
INSTYTUT GEODEZJI I GEOINFORMATYKI
Uniwersytet Przyrodniczy we Wrocławiu ul. Grunwaldzka 53 50-357 Wrocław NIP: 896-000-53-54, REGON: 00000 18 67 tel. +48 71 3205617 fax +48 71 3205617 e-mail: igig@upwr.edu.pl |